Differentiable Adaptive Game-Theoretic Planner
Adaptive game-theoretic planning enabled by a differentiable game solver
News
-
2023-07-10 Graduated from TU Delft! I successfully defended my thesis and obtained my MSc degree with Cum Laude distinction in Robotics [slides]!
-
2023-07-05 I gave a talk at the Control and Learning for Autonomous Robotics (CLeAR) Lab, UT Austin!
-
2023-06-06 The journal article of this work has been published and is available on IEEE Xplore!
-
2023-04-17 This work has been accepted at the IEEE Robotics and Automation Letters (RA-L) and will be presented at IROS 2023. See you in Detroit!
-
2023-01-24 I gave an invited talk at the Safe Robotics Laboratory, Princeton [slides]. Thanks for the invitation!
-
2022-12-01 We submitted this work and published the preprint version!
About
The work is with Lasse Peters and Prof. Javier Alonso-Mora. I developed an adaptive, differentiable game solver that jointly estimates agents’ objectives using gradient and solves for generalized Nash equilibrium strategies in non-cooperative dynamic games for safe interaction.
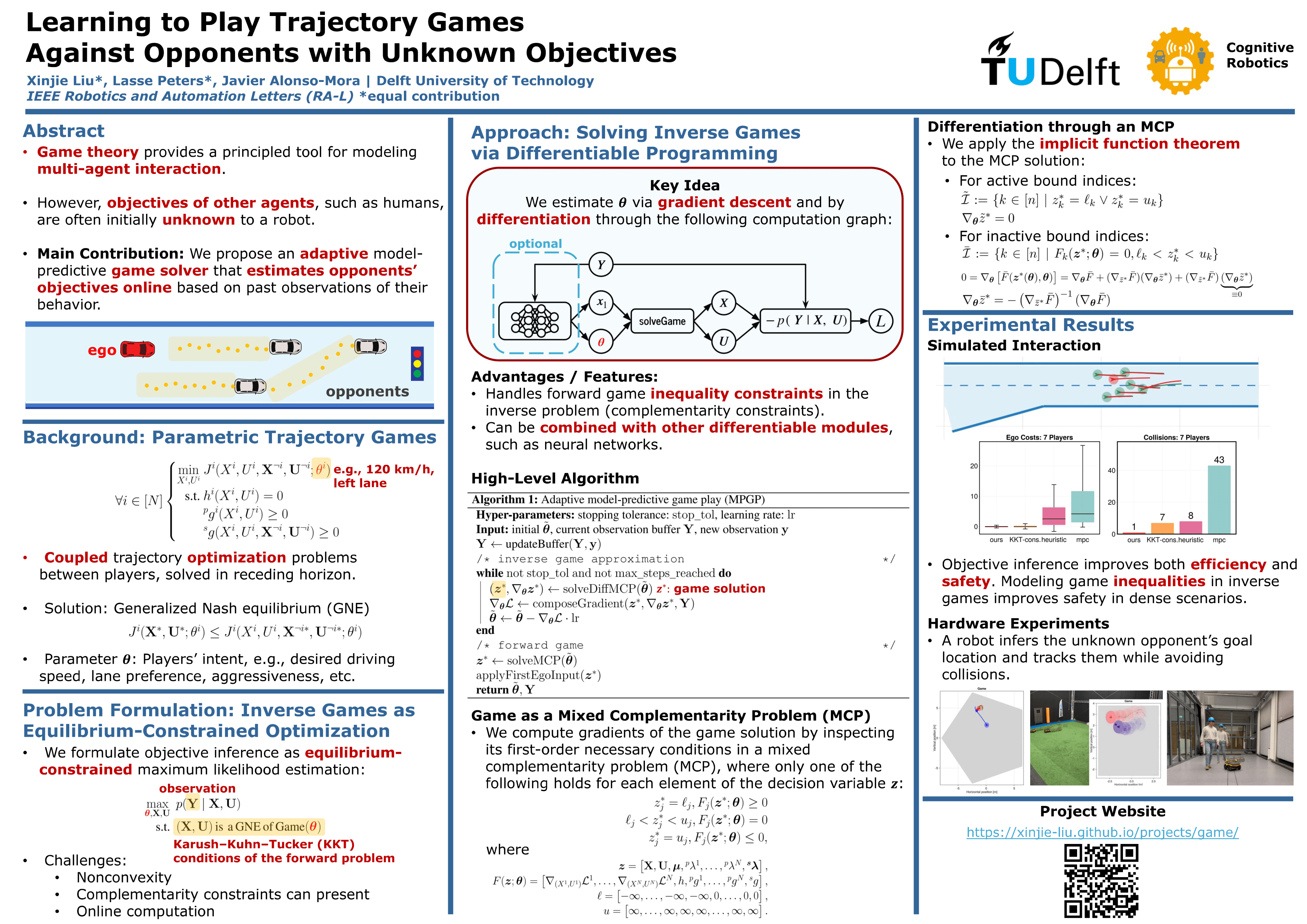
Abstract
Many autonomous agents, such as intelligent vehicles, are inherently required to interact with one another. Game theory provides a natural mathematical tool for robot motion planning in such interactive settings. However, tractable algorithms for such problems usually rely on a strong assumption, namely that the objectives of all players in the scene are known. To make such tools applicable for ego-centric planning with only local information, we propose an adaptive model-predictive game solver, which jointly infers other players’ objectives online and computes a corresponding generalized Nash equilibrium (GNE) strategy. The adaptivity of our approach is enabled by a differentiable trajectory game solver whose gradient signal is used for maximum likelihood estimation (MLE) of opponents’ objectives. This differentiability of our pipeline facilitates direct integration with other differentiable elements, such as neural networks (NNs). Furthermore, in contrast to existing solvers for cost inference in games, our method handles not only partial state observations but also general inequality constraints. In two simulated traffic scenarios, we find superior performance of our approach over both existing game-theoretic methods and non-game-theoretic model-predictive control (MPC) approaches. We also demonstrate our approach’s real-time planning capabilities and robustness in two hardware experiments.
Paper

@article{liu2023learning,
author={Liu, Xinjie and Peters, Lasse and Alonso-Mora, Javier},
journal={IEEE Robotics and Automation Letters},
title={Learning to Play Trajectory Games Against Opponents With Unknown Objectives},
year={2023},
volume={8},
number={7},
pages={4139-4146},
doi={10.1109/LRA.2023.3280809}}
Code
Poster
Slides